

I’ve been asked many times about the history of Gloveone, and how it was conceived. That’s why I’ve digged in the past to let you know how it happened and how it evolved.
Hello Glove! SensaGlove v0
I was in the last year of BsC when José Pascual Molina, professor and one of the founders of the LoUISE research group at Castilla-La Mancha University (UCLM)talked to me about one problem they had at their Virtual Reality laboratory in Albacete (Spain). They had experience with many Virtual Reality devices such as head mounted displays, tracking systems, and gloves. However, all these devices were focused on the sight and hearing senses, and none of them let the user interact naturally and feel what they touched on their virtual environment. There were some haptic gloves available in the market but their features were very basic, and the price was unaffordable even for the University. For that reason, he proposed me to develop our own haptic glove.
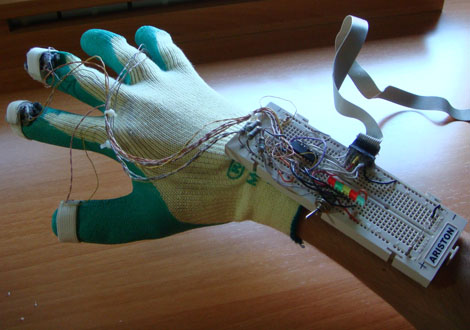
Even though my background was focused on Computer science, I was very interested in Electronics as well, so I started creating a quick and ugly proof of concept. This is how SensaGlove v0 was born. The electronics were assembled on a breadboard and relied on the parallel port to be connected to the PC. It had 3 ERMactuators (vibrators) on top of the thumb, index and middle fingers. Their intensity could be independently modulated by the software, and this vibration strength could be seen thanks to some LEDs included.
SensaGlove v1
The refined version of the glove was part of my BsC final project, and it was called SensaGlove v1. All the electronics were confined to a small box and lycra fabric was used to increase the comfort. One of the main features of this glove was the possibility of attaching the actuators to other off-the-shelf datagloves. With this approach, tracking would be performed by the third party glove and haptics would be played with SensaGlove.

SensaGlove v2
Once I finished my BsC I started working on different projects at the UCLM thanks to Pascual González, professor and founder of the LoUISE research group. Some of my colleagues at the University were doing their MC at the same time, so I decided to improve SensaGlove and let them use it in their own projects. In particular, it was integrated in a Collaborative system with multimodal feedback created by Arturo García and in a Model of interaction for CVEs created by Diego Martínez.
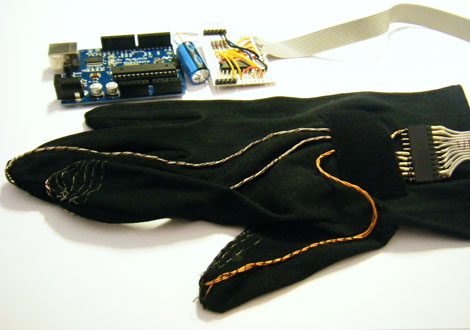
This version used an Arduino microcontroller, which was a quick way to boost the development of the electronics and to provide USB capabilities. Also, smaller flat ERM actuators were fitted inside the glove to improve the perceived sensations.
None of these three versions of SensaGlove were able to perform finger tracking by itself. Instead, they had contact patches on the fingertips to detect pinch gestures, ie. pressing the thumb against any other finger. The hand tracking (rotation and position of the hand in space) was achieved by placing an electromagnetic sensor from the Flock of Birds tracking system.
SensaGlove v3
In 2009 I started my Ph. D. advised by J.P. Molina and P. González. I focused it on the improvement of vibrotactile sensations for virtual environments. As I needed more tracking precision, I created a new version based on the optical tracking provided by an Impulse PhaseSpace.

Vibrotactile technology was also pushed to the limits. To accomplish that, I created a 16 channel ERM controller with overdrive and braking capabilities. These methods were introduced in order to reduce the start and stop latency of the motors, improving the haptic response felt by the user. This controller, was also part of a generic vibrotactile tool named VITAKI (VIbroTActile KIt).
SensaGlove v4
Next revision of the SensaGlove controller introduced two major upgrades. The circuit was properly routed on a single PCB, and more importantly, it featured an scalable feature: more vibrators could be connected by stacking shields on top of it (up to 16 actuators per layer). It also provided a “volume” knob to adjust the overall vibration intensity perceived by the user.
SensaGlove v5
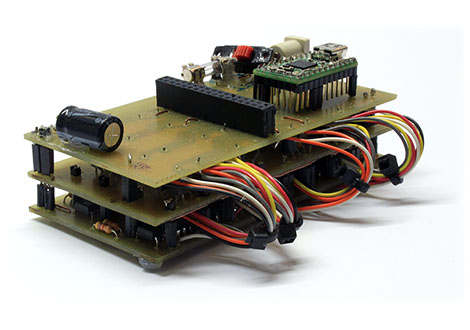
In 2014 SensaGlove went wireless. The controller form factor was heavily reduced while keeping the overdrive and braking features. As a drawback only 10 vibrators were supported. A battery, charger and bluetooth module were added to go fully wireless. The proof of concept design had three PCB’s (microcontroller, ERM drivers and bluetooth) wired and fitted together in a single enclosure.

SensaGlove v6 / Gloveone rev 0
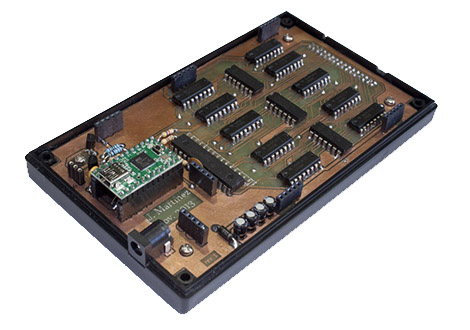
I redesigned SensaGlove v6 to be used with an affordable Leap Motion tracking system. The electronics were very similar to SensaGlove v5, the only difference was that the three PCBs were routed together to reduce the wiring.

I joined Neurodigital in November 2014 to keep improving the glove and we changed its name to Gloveone. This is one of the first public appearances of Gloveone:
A new white version optimized for Leap Motion can be seen here:
- http://uploadvr.com/return-of-the-glove-neurodigital-technology-seeks-to-bring-gloves-back-to-vr-with-the-gloveone/
- http://www.teleprensa.com/almeria/neurodigital-technologies-desarrolla-un-pionero-sistema-de-estimulacion-multisensorial-para-rehabilitacion-neurologica.html
- http://www.techradar.com/news/gaming/i-just-played-catch-with-an-invisible-baseball-but-it-felt-like-it-was-real-1275157
Gloveone rev 1
For the second revision of Gloveone I reduced the form factor of the circuit so that it could be placed on top of the hand.

Gloveone rev 1 was shown to the public at the Fun & Serious game festival of Bilbao in December 2014.

What’s next?
Neurodigital launched a Kickstarter campaign during 2015’s summer.
One year later we added IMU-based finger and arm tracking, which was shown at E3 2016.
Soon after the glove was renamed as AvatarVR and Gloveone dissapeared from Neurodigital’s website.
Unfortunately there is still controversy around the Kickstarter campaign, with many backers asking for their rewards.
By the end of 2016 I decided to quit Neurodigital and started working as a freelance.