



Immersive 3D Modeler with Vibrotactile Feedback
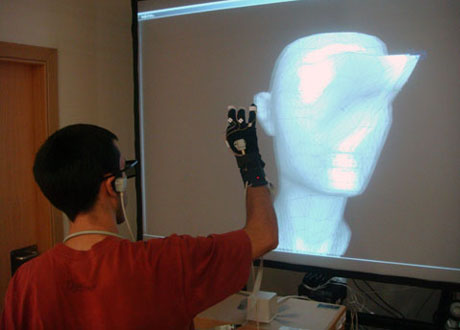
This system consists of a Virtual Reality setup to model 3D objects with the hand, and it provides vibrotactile feedback to the user.
The main features of the system are:
- Stereo visualization with a retroprojection system and polarized glasses.
- Electromagnetic tracking system (Ascension Technology Flock of Birds). One sensor on the head allows the computation of motion parallax, and one more is attached to the hand of the user for the interaction.
- Vibrotactile feedback to the fingertips. A custom dataglove connected to the parallel port stimulates each of the five fingertips of the hand. It also recognises pinch gestures between two fingers.
- The 3D objects are loaded and saved as a X3D mesh.
- Interaction: The user can either select and move each vertex with a pinch gesture, or he can apply pressure to the mesh with the whole hand.
- An elastic mesh deformation algorithm is used to affect neighbour vertexes.
Download
Bachelor’s thesis (spanish) [PDF]
Presentation (spanish) [PDF]
Reference
Martinez, J., Molina, J.P., Diseño y construcción de un sistema inmersivo y de un guante con retorno táctil para el modelado de objetos 3D con las manos. Bachelor’s thesis, University of Castilla-La Mancha, 2007.