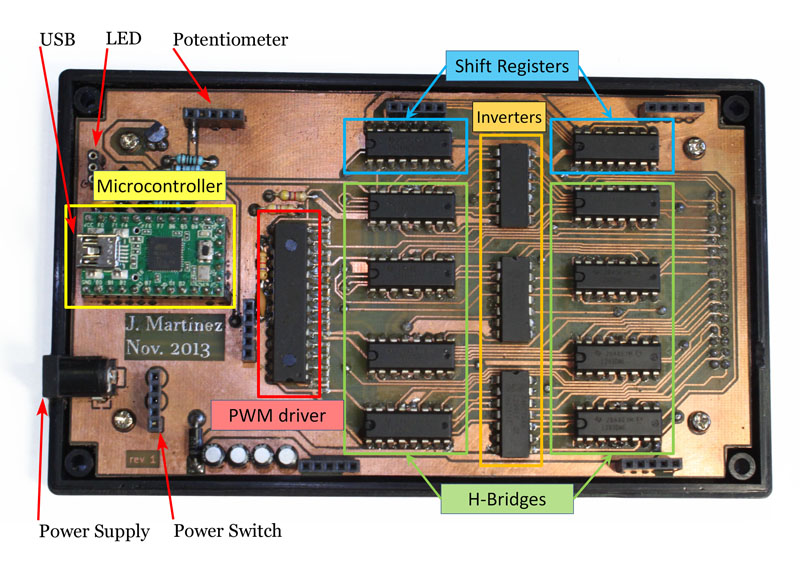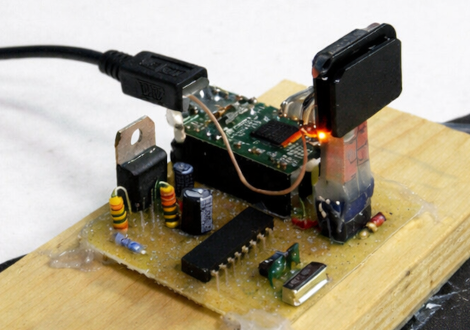
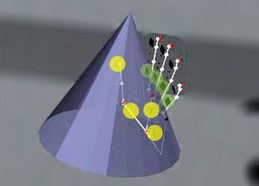
A stereo optical tracking system capable of calculating the pose of led constellations in space.

Ultrasound mid-air haptics to let users naturally explore and feel the texture of virtual objects

Obstetric simulator to identify the fetus head position and the cervical effacement using haptic technology
Development of a vibrotactile dataglove composed of 11 ERM actuators in an experiment to identify 3D shape, sizes and weights.

Video conference system based on multiple cameras and face tracking to provide a 3D effect using motion parallax.

3D mesh modeler with vibrotactile feedback and natural interaction
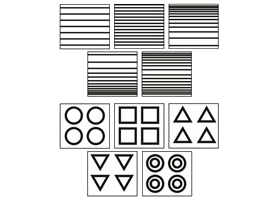
Evaluation of haptic feedback methods for texture and shape discrimination