
Sensaglove v1
This is the final version of my first vibrotactile dataglove, built in august 2007. The circuit, which was tested using a protoboard, is soldered using a perfboard, and the communication to the PC is achieved via the parallel port. A ULN2003 darlington array is used to supply enough current to the actuators. This version includes small potentiometers in line with the actuators to adjust possible differences between the actuators. The size of the actuators has been reduced and they are placed in contact with the fingertip for an improved sensation. The elastic band has Velcro and this allows the actuators to be mounted on an existent dataglove (like the CyberGlove) that measures gestures. This new version also features the use of a Nylon glove, instead of the green rubber one, and a custom-made case for the circuit.
Features
| Communication | Parallel port |
| Output channels | 5 |
| Output intensity control | Software PWM |
| Output amplifier | ULN2003 darlington array |
| Actuators | ERM actuators mounted on the fingertips |
| Input channels | 5 |
| Input sensors | Electric wire and aluminium foil |
| Additional features | Led indicators Adjustable actuators on the fingertips with elastic bands Power switch |
Photos
-
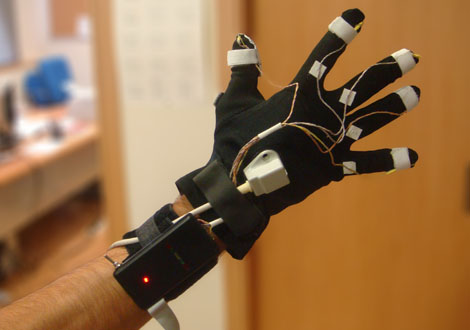
- General view of the glove. It also provides an attachment point for a tracker.
-
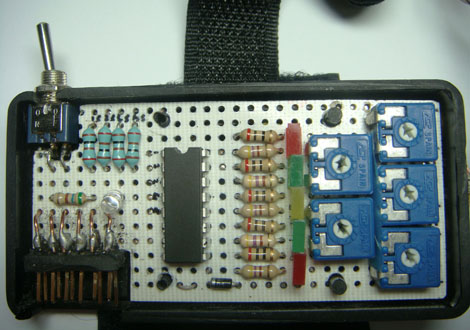
- Detail of the circuit soldered to a perfboard
-

- Custom plastic case for the circuit
-
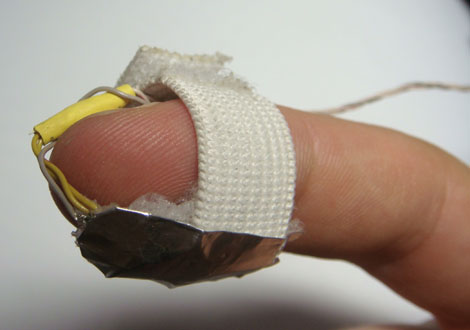
- The vibrator is placed under the fingertip with an elastic strap
Publications
Martinez, J., Molina, J.P., Diseño y construcción de un sistema inmersivo y de un guante con retorno táctil para el modelado de objetos 3D con las manos. Bachelor’s thesis, University of Castilla-La Mancha, 2007. [PDF]