The scope of this research is to evaluate three different haptic feedback methods for texture discrimination in virtual environments. In particular, a Phantom force feedback device, a custom made vibrotactile dataglove and paper palpable prototypes have been used.
This paper describes a new study which corroborates the results of an initial experiment and performs a more in-depth evaluation of some results of interest and, in particular, those based on gender. In the experiment expansion, the number of users has been increased so both genders are even and the texture identification strategies have been analyzed. Finally, statistical analyses have been conducted to assess the differences between both genders, showing a new path which could be explored with new experiments. In addition, the vibrotactile dataglove has proved to have a notable behavior in the detection of varying grating textures, and it is even useful to identify shapes.
Selected Publications
- Martínez, J., García, A.S., Molina, J.P., Martínez, D. & González, P. (2013). An empirical evaluation of different haptic feedback for shape and texture recognition. The Visual Computer, 29(2), 111–121. [Web]
- Martínez, J., Martínez, D., Molina, J.P., González, P. & García, A.S. (2011). Comparison of Force and Vibrotactile Feedback with Direct Stimulation for Texture Recognition. 2011 International Conference on Cyberworlds (pp. 62–68) Banff, Canada. [Web]
The Vitaki Toolkit is a powerful set of tools created to provide vibrotactile feedback in Virtual Environments and videogames. This is the electronic controller, and the core of the toolkit.
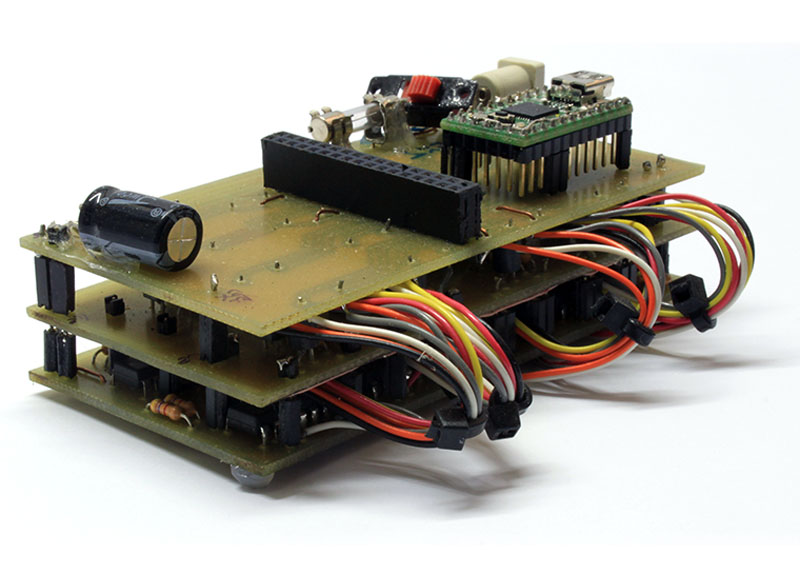
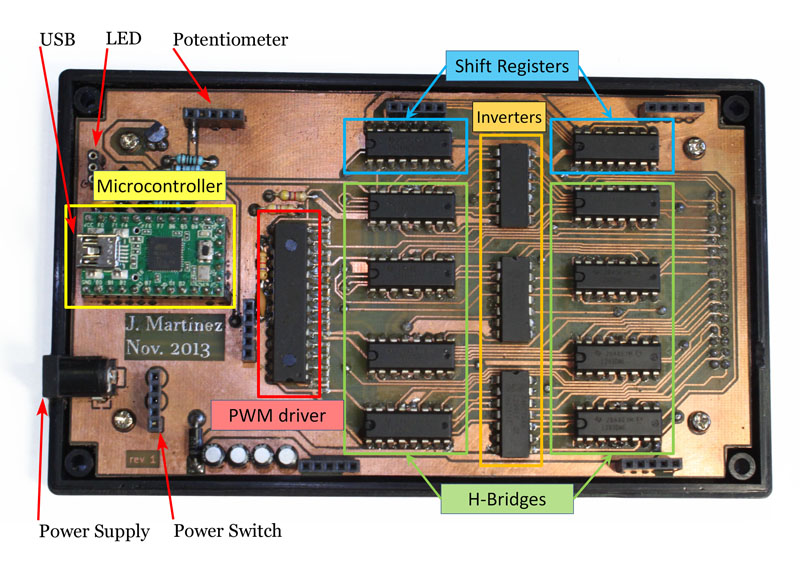
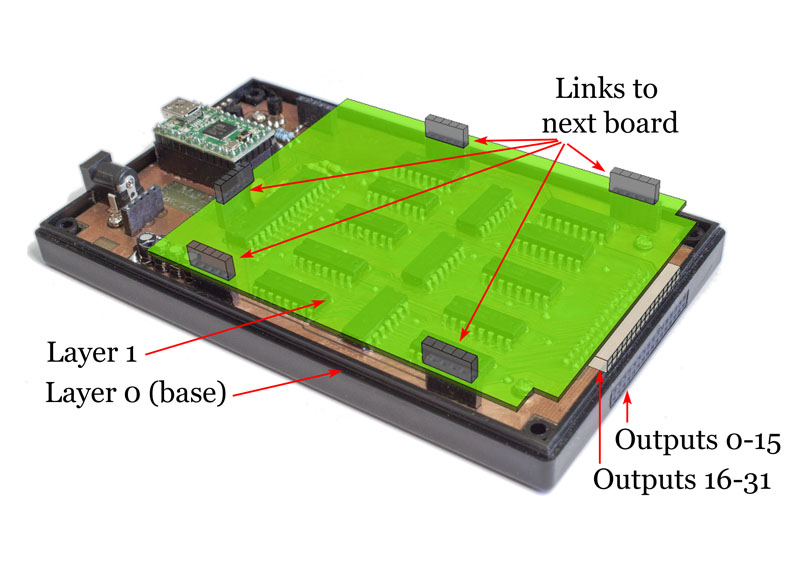
The electronic controller is built around a Teensy 2.0 AVR controller, powered by an Atmel ATmega32u4 chip. The controller provides 16 outputs, but it has been designed to be scalable, so new layers can be efficiently stacked on top of the PCB to support more outputs. Aside from this, one of the main features is the ability to perform overdrive and active braking to improve the response of ERM actuators. A programmable knob has been added to the last prototype, which is usually used by the users to adjust the vibration intensity to their preferences.
Features
| Communication |
USB |
| Power |
USB/External adapter |
| Output channels |
16 (scalable) |
| Output intensity control |
Hardware PWM (4096 steps) |
| Output amplifier |
L293D H-Bridges |
| Actuators |
ERM actuators mounted on the fingertips |
| Input channels |
1 |
| Input sensors |
Analog potentiometer |
| Microcontroller |
Teensy 2.0 (ATMega32u4) |
| Additional features |
On/Off switch, bicolor led status, programmable knob |
Photos
-
-
First prototype of the electronic controller
-

-
Case of the Vitaki electronic controller with power switch and input potentiometer
-
-
PCB of the Vitaki electronic controller
-
-
The PCB supports stackable layers to add more outputs
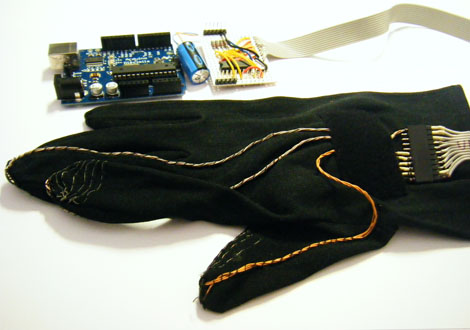
This glove was developed during 2008. The main innovation introduced was the use of the USB port, instead the parallel port required by previous versions. To this end, an Arduino Diecimila was used, coupled with a ULN2003 darlington array to feed the actuators. As a consequence, the PWM signal -necessary to change the power of the actuators- was generated by the internal oscillator of the microcontroller, being much more stable.
The glove was designed to carry out a collaborative task in a Virtual Environment, which is described in [3]. Thus, it included only three actuators, located on the index, middle and thumb fingers. Three touch sensors were also added to detect pinch gestures. This vibrotactile device was also supported by a Collaborative Virtual Environment architecture [2], and it was described in a paper presented to JOREVIR [1].
Features
| Communication |
USB |
| Output channels |
3 (expandable up to 6) |
| Output intensity control |
Hardware PWM (256 steps) |
| Output amplifier |
ULN2003 darlington array |
| Actuators |
ERM actuators mounted on the fingertips |
| Input channels |
3 |
| Input sensors |
Electric wire |
| Microcontroller |
Arduino Diecimila (ATMega328) |
| Aditional features |
Powered by Arduino Diecimila |
Photos
-

-
Arduino Diecimila and the Sensaglove v2 circuit soldered on a perfboard.
-
-
Detail of the conductive thread used to make the contact sensors
Selected publications
- Martínez, J., García, A.S., Martínez, D. & González, P. (2009). Desarrollo de un Guante de Datos con Retorno Háptico Vibrotáctil Basado en Arduino. Interacción 2009 – Jornadas de Realidad Virtual (pp. 1–10) Barcelona. [PDF]
- Martínez, D., García, A.S., Martínez, J., Molina, J.P. & González, P. (2008). A Model of Interaction for CVEs Based on the Model of Human Communication. Journal of Universal Computer Science (JUCS), 14(19), 3071–3084.
- García, A.S., Molina, J.P., González, P., Martínez, D. & Martínez, J. (2009). An experimental study of collaborative interaction tasks supported by awareness and multimodal feedback. Proceedings of the 8th International Conference on Virtual Reality Continuum and its Applications in Industry – VRCAI ’09 (pp. 77) Tokyo, Japan. [Web]
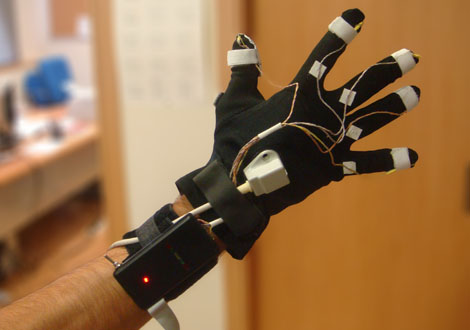
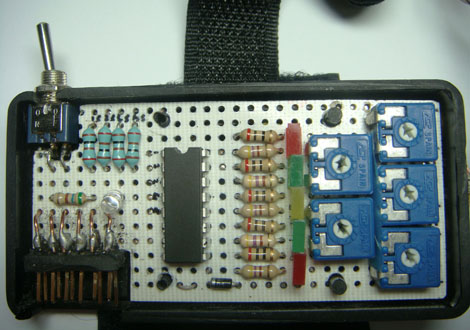
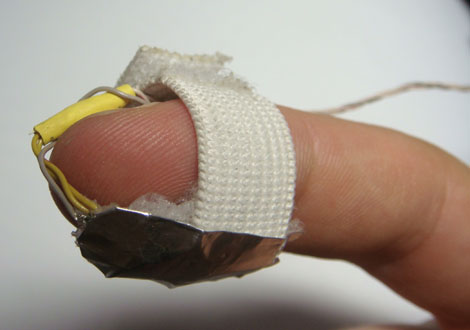
This is the final version of my first vibrotactile dataglove, built in august 2007. The circuit, which was tested using a protoboard, is soldered using a perfboard, and the communication to the PC is achieved via the parallel port. A ULN2003 darlington array is used to supply enough current to the actuators. This version includes small potentiometers in line with the actuators to adjust possible differences between the actuators. The size of the actuators has been reduced and they are placed in contact with the fingertip for an improved sensation. The elastic band has Velcro and this allows the actuators to be mounted on an existent dataglove (like the CyberGlove) that measures gestures. This new version also features the use of a Nylon glove, instead of the green rubber one, and a custom-made case for the circuit.
Features
| Communication |
Parallel port |
| Output channels |
5 |
| Output intensity control |
Software PWM |
| Output amplifier |
ULN2003 darlington array |
| Actuators |
ERM actuators mounted on the fingertips |
| Input channels |
5 |
| Input sensors |
Electric wire and aluminium foil |
| Additional features |
Led indicators
Adjustable actuators on the fingertips with elastic bands
Power switch |
Photos
-
-
General view of the glove. It also provides an attachment point for a tracker.
-
-
Detail of the circuit soldered to a perfboard
-

-
Custom plastic case for the circuit
-
-
The vibrator is placed under the fingertip with an elastic strap
Publications
Martinez, J., Molina, J.P., Diseño y construcción de un sistema inmersivo y de un guante con retorno táctil para el modelado de objetos 3D con las manos. Bachelor’s thesis, University of Castilla-La Mancha, 2007. [PDF]
This is a prototype of a vibrotactile dataglove built in december 2006. The circuit is implemented using a protoboard for testing purposes, and the communication to the PC is achieved via the parallel port. A ULN2003 darlington array is used to supply enough current to the actuators.
Features
| Communication |
Parallel port |
| Output channels |
5 |
| Output intensity control |
Software PWM |
| Output amplifier |
ULN2003 darlington array |
| Actuators |
ERM actuators mounted on top of the fingers |
| Input channels |
5 |
| Input sensors |
Electric wire and aluminium foil |
| Aditional features |
Led indicators
Adjustable actuators on top of the fingers with elastic bands |
Publications
Martinez, J., Molina, J.P., Diseño y construcción de un sistema inmersivo y de un guante con retorno táctil para el modelado de objetos 3D con las manos. Bachelor’s thesis, University of Castilla-La Mancha, 2007. [PDF]
