
Selected Work
-
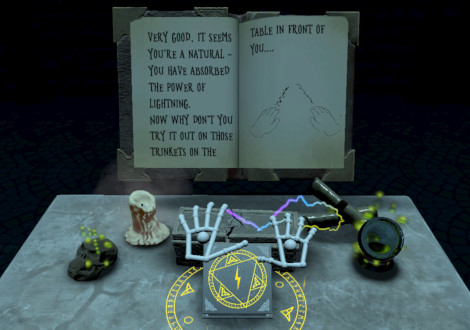
Ultrahaptics – Feels like Magic
This experience combines visual, audio and ultrasonic haptic stimulation in which the user takes on the role of a wizard apprentice. -

Lemonity – Hand Navigation for Unity
Plugin for Unity to navigate the scene using gestures. Powered by LeapMotion. -

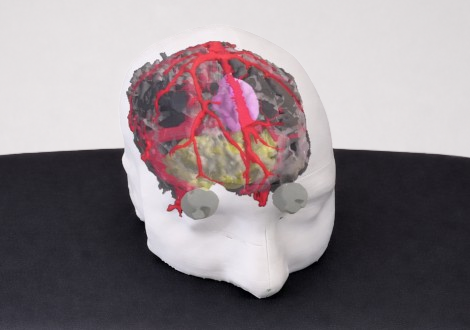
Mid-air Haptic Texture Exploration in VR
Ultrasound mid-air haptics to let users naturally explore and feel the texture of virtual objects -

Digital Jump Rope and Videogame
A custom-built wireless jump rope that syncs with a Unity videogame, turning real-world workouts into a real-time interactive experience. -
-
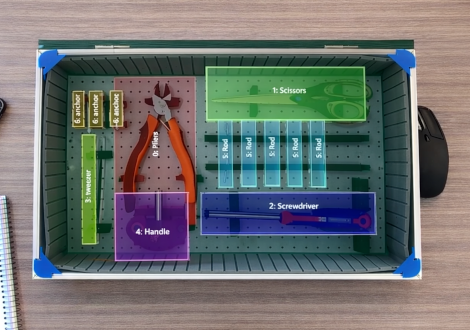
Offline XR Tool Inventory
Deep learning object detector trained to work offline and project detections to be seen as a 3D overlay for the user.
Recent Posts
Lemonity v1.0 released

When developing objects or scenes in 3D we need to constantly move our point of view. We usually do that using the mouse and some helper keys to change modes. The problem is that it’s a 2D device, we can’t move and rotate the camera or the object efficiently as we would do in real […]
Creating haptics using Signed Distance Functions (SDF)
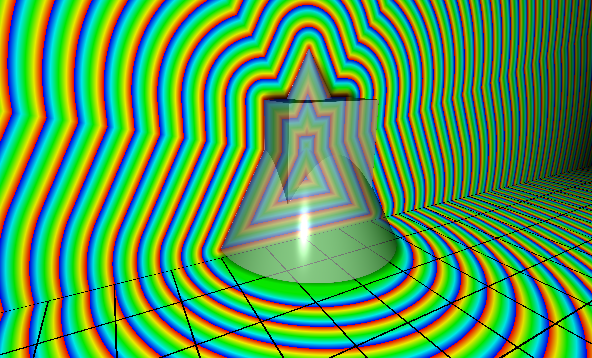
Signed Distance Functions (SDF) are a great tool to efficiently and accurately calculate haptics. Using mathematics to implicitly define regular objects is easier than expected.
New lab!
It’s time to improve my workspace. The lab is the place where I work and have fun and the same time. Wherever I lived I created a space to tinker with electronics. Now that I have my own house, it’s time to invest a little bit more. Here is a quick overview of them. First […]
Clients





PhD in Haptics
Feeding the sense of touch when interacting in virtual worlds
XR R&D Engineer
Developing cutting edge XR solutions
Hardware Prototyping
I create prototypes to quickly validate designs
Algorithms
Combining maths and computer science to solve problems